光源を追いかけるロボットカー
白熱電球や太陽の光を追いかけます。もっとも単純なロボットカーです。
白熱電球の光を当てると、白熱電球が移動しても、その方向に旋回して、電球を追いかけて走ります。光源を追う生き物のように見える動きです。
太陽電池モジュールに当たる太陽光に手で影を作ることでも走行を右へ左へとコントロールできます。
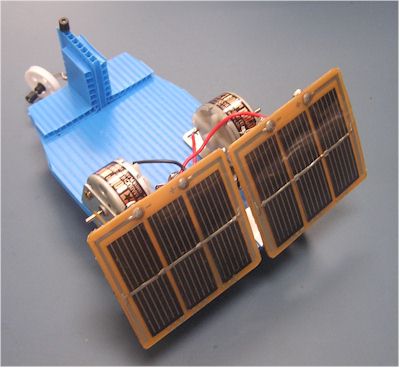
しかし、配線は簡単です。太陽電池モジュール2枚、太陽電池用モーターが2個、それを電線でつないであるだけです。
| No.50 | ソーラーロボット | 2008.4.2.掲載 |
|
光源を追いかけるロボットカー 白熱電球や太陽の光を追いかけます。もっとも単純なロボットカーです。 白熱電球の光を当てると、白熱電球が移動しても、その方向に旋回して、電球を追いかけて走ります。光源を追う生き物のように見える動きです。 太陽電池モジュールに当たる太陽光に手で影を作ることでも走行を右へ左へとコントロールできます。 しかし、配線は簡単です。太陽電池モジュール2枚、太陽電池用モーターが2個、それを電線でつないであるだけです。 |
|
種明かし
左右のモーター軸から左右の大きなプーリー(車輪兼用)に輪ゴムをかけてあります。左右の車輪は独立に動きます。
図のように右側の太陽電池は左側のモーターに、左側の大陽電池の出力を右側のモーターにつないであります。こうすると、例えば右から電球が近づくと、左側のモーター軸が多く回転するので、右旋回します。
つまり光の強い方に旋回することになります。ですから、つかず離れずランプを動かすと、ランプについて来るように車は動きます。
屋外であれば、次の図のように太陽を背にして、走らせましょう。手で影を作ることで右や左に操縦することができます。
次図のように2つの太陽電池の間に紙などでついたてを作ると、方向感度が敏感になります。光の方向から少しでもズレると、車輪の回転に差がつくので、たちまち旋回して光の方向に車の向きが修正されます。

自動車の方向はドライバーの視覚とハンドル操作で制御されますが、このロボットでは太陽電池が電源であり、センサーでもあります。光量の差によって車の進行方法が制御されています。非常に単純でアナログな制御ですね。
おまけ情報
![]() くわしい作り方は、2008年2月発売の拙著 『太陽電池のしくみがわかる実験と工作』 誠文堂新光社 に掲載しました。
くわしい作り方は、2008年2月発売の拙著 『太陽電池のしくみがわかる実験と工作』 誠文堂新光社 に掲載しました。